The Finite Element Method – Lecture Notes
Introduction to FEM
A simple example
Consider the model problem \[\begin{aligned} -u''(x) &= 1,\text{ for } x\in (0,1) \label{model1eq1} \\ u(0) &= u(1) = 0 \label{model1eq2} \end{aligned}\] with exact solution \(u(x) = x(1-x)/2\). Find an approximate solution of the form \[\begin{aligned} \hat{u}(x) = A \sin (\pi x) = A \varphi(x) \end{aligned}\] Various ways to impose the equation:
- Collocation
-
: Impose \(-\hat{u}''(x_c) = 1\) for some collocation point \(x_c\) \(\Longrightarrow\) \(A\pi^2\sin(\pi x_c) = 1\)
\(x_c=\frac12\) \(\Longrightarrow\) \(A= \frac{1}{\pi^2} = 0.1013\)
\(x_c=\frac14\) \(\Longrightarrow\) \(A= \frac{\sqrt{2}}{\pi^2} = 0.1433\)
- Average
-
: Impose the average of the equation over the interval: \[\begin{aligned} \int_0^1 -\hat{u}''(x)\,dx &= \int_0^1 1\,dx \\ \int_0^1 A\pi^2 \sin(\pi x)\,dx &= A\pi^2 \frac{2}{\pi} = 2A\pi = 1 \\ A &= \frac{1}{2\pi} = 0.159 \end{aligned}\]
- Galerkin
-
: Impose the weighted average of the equation over the interval: \[\begin{aligned} \int_0^1 -\hat{u}''(x) v(x)\,dx = \int_0^1 1\cdot v(x)\,dx \end{aligned}\] A Galerkin method using the weight functions \(v(x)\) from the same space as the solution space, that is, \(v(x) = \varphi(x)\). This gives \[\begin{aligned} \int_0^1 A\pi^2 \sin^2(\pi x)\, dx &= \int_0^1 \sin(\pi x)\, dx \\ A\pi^2 \cdot \frac12 &= \frac{2}{\pi} \\ A &= \frac{4}{\pi^3} = 0.129 \end{aligned}\]
The three solutions are shown in figure 1. The finite element method is based on the Galerkin formulation, which in this example clearly is superior to collocation or averaging.

Other function spaces
Use piecewise linear, continuous functions of the form \(\hat{u}(x) = A\varphi(x)\) with \[\begin{aligned} \varphi(x) = \begin{cases} 2x & x\le \frac12 \\ 2-2x & x>\frac12 \end{cases} \end{aligned}\] Galerkin gives the FEM formulation \[\begin{aligned} \int_0^1 -\hat{u}''(x) \varphi(x)\,dx = \int_0^1 \varphi(x)\,dx \end{aligned}\] Since \(\hat{u}''\) is not bounded, integrate LHS by parts: \[\begin{aligned} \int_0^1 \hat{u}'(x) \varphi'(x)\, dx - \left[ \hat{u}'(x) \varphi(x) \right]_0^1 &= \int_0^1 \hat{u}'(x) \varphi'(x)\, dx - \hat{u}'(1)\varphi(1) + \hat{u}'(0)\varphi(0) \\ &= \int_0^1 \hat{u}'(x) \varphi'(x)\, dx, \end{aligned}\] since \(\varphi(0)=\varphi(1)=0\). This leads to the final formulation \[\begin{aligned} \int_0^1 \hat{u}'(x)\varphi'(x)\,dx = \int_0^1 \varphi(x)\,dx. \label{model1fem} \end{aligned}\] To solve for \(\hat{u}(x)=A\varphi(x)\), note that \(\hat{u}'(x)=A\varphi'(x)\) and \[\begin{aligned} \varphi'(x) = \begin{cases} 2 & x\le \frac12 \\ -2 & x>\frac12 \end{cases} \end{aligned}\] Equation ([model1fem]) then becomes \[\begin{aligned} \int_0^{1/2} (2A)(2)\,dx + \int_{1/2}^1 (-2A)(-2)\,dx &= \int_0^{1/2} 2x\,dx + \int_{1/2}^1 (2-2x)\,dx \end{aligned}\] or \(4A = 1/2\), that is, \(A = 1/8\), and the FEM solution is \(\hat{u}(x) = \varphi(x)/8\).
More basis functions
To refine the solution space, introduce a triangulation of the domain \(\Omega=[0,1]\) into non-overlapping elements: \[\begin{aligned} T_h = \{K_1,K_2,\ldots \} \end{aligned}\] such that \(\Omega = \cup_{K\in T_h} K\). Now consider the space of continuous functions that are piecewise linear on the triangulation and zero at the end points: \[\begin{aligned} V_h = \{ v\in C^0([0,1]) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h,\ v(0)=v(1)=0 \}. \end{aligned}\] Here \(\mathbb{P}_p(K)\) is the space of polynomials on \(K\) of degree at most \(p\). Define a basis \(\{\varphi_i\}\) for \(V_h\) by the basis functions \(\varphi_i\in V_h\) with \(\varphi_i(x_j) = \delta_{ij}\), for \(i,j=1,\ldots,n\). Our approximate solution \(u_h(x)\) can then be written in terms of its expansion coefficients and the basis functions as \[\begin{aligned} u_h(x) = \sum_{i=1}^n u_i \varphi_i(x), \label{femsol} \end{aligned}\] where we note that this particular basis has the convenient property that \(u_h(x_j) = u_j\), for \(j=1,\ldots,n\).

A Galerkin formulation for ([model1eq1])-([model1eq2]) can now be stated as: Find \(u_h\in V_h\) such that \[\begin{aligned} \int_0^1 u'_h(x) v'(x)\,dx = \int_0^1 v(x)\,dx,\qquad \forall v\in V_h \label{modelgal1} \end{aligned}\] In particular, ([modelgal1]) should be satisfied for \(v=\varphi_i\), \(i=1,\ldots,n\), which leads to \(n\) equations of the form \[\begin{aligned} \int_0^1 u'_h(x) \varphi_i'(x)\,dx = \int_0^1 \varphi_i(x)\,dx,\qquad \text{for } i=1,\ldots,n \end{aligned}\] Insert the expression ([femsol]) for the approximate solution and its derivative, \(u'_h(x) = \sum_{i=1}^n u_i \varphi'_i(x)\): \[\begin{aligned} \int_0^1 \left( \sum_{j=1}^n u_j \varphi'_j(x) \right) \varphi'_i(x)\,dx &= \int_0^1 \varphi_x(x)\,dx,\qquad i=1,\ldots,n \end{aligned}\] Change order of integration/summation: \[\begin{aligned} \sum_{j=1}^n u_j \left[ \int_0^1 \varphi'_i(x) \varphi'_j(x)\,dx \right] &= \int_0^1 \varphi_i(x)\,dx,\qquad i=1,\ldots,n \end{aligned}\] This is a linear system of equations \(A\boldsymbol{u} = \boldsymbol{f}\), with \(A=[ a_{ij} ]\), \(\boldsymbol{u} = [ u_i ]\), \(\boldsymbol{f} = [ f_i ]\), for \(i,j=1,\ldots,n\), where \[\begin{aligned} a_{ij} &= \int_0^1 \varphi'_i(x) \varphi'_j(x)\,dx \\ f_i &= \int_0^1 \varphi_i(x)\,dx \end{aligned}\]
- Example
-
: Consider a triangulation of \([0,1]\) into four elements of width \(h=1/4\) between the node points \(x_i = ih\), \(i=0,\ldots,4\). We then get a solution space of dimension \(n=3\), and basis functions \(\varphi_1,\varphi_2,\varphi_3\). When calculating the entries of \(A\), note that
\(A\) is symmetric, that is, \(a_{ij} = a_{ji}\)
\(A\) is tridiagonal, that is, \(a_{ij}=0\) whenever \(|i-j|>1\)
For our equidistant triangulation, \(a_{ii} = a_{jj}\) and \(a_{i,i+1} = a_{j,j+1}\)
This gives \[\begin{aligned} a_{11} &= 4\cdot 4 \cdot \frac14 + (-4)(-4)\frac14 = 8 \\ a_{12} &= (-4)\cdot 4 \cdot \frac14 = -4 \\ a_{22} &= a_{33} = a_{11} = 8 \\ a_{21} &= a_{12} = a_{23} = a_{32} = -4 \\ a_{13} &= a_{31} = 0 \end{aligned}\] and \[\begin{aligned} f_1 &= f_2 = f_3 = \int_0^1 \varphi_1(x)\,dx = \frac14 \end{aligned}\] and the linear system becomes \[\begin{aligned} \begin{bmatrix} 8 & -4 & 0 \\ -4 & 8 & -4 \\ 0 & -4 & 8 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \end{bmatrix} = \begin{bmatrix} 1/4 \\ 1/4 \\ 1/4 \end{bmatrix} \end{aligned}\] with solution \[\begin{aligned} u = (u_1, u_2, u_3)^T = (3/32, 1/8, 3/32)^T \end{aligned}\] Note that the discretization exactly matches the one obtained with finite differences and the 2nd order 3-point stencil: \[\begin{aligned} \frac{1}{(1/4)^2} \begin{bmatrix} 2 & -1 & 0 \\ -1 & 2 & -1 \\ 0 & -1 & 2 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \end{bmatrix} = \begin{bmatrix} 1 \\ 1 \\ 1 \end{bmatrix} \end{aligned}\]
Neumann boundary conditions
The Dirichlet conditions \(u(0)=u(1)=0\) where enforced directly into the approximation space \(V_h\). In the finite element method, a Neumann condition (or natural condition) is instead implemented by modifying the variational formulation. Consider the model problem \[\begin{aligned} -u''(x) &= f(x)\text{ for } x\in(0,1) \\ u(0) &= 0 \\ u'(1) &= g \end{aligned}\] The function space is only enforcing the Dirichlet condition at the left end point: \[\begin{aligned} V_h = \{ v\in C^0([0,1]) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h,\ v(0)=0 \}, \end{aligned}\] which in our example gives an additional degree of freedom. The Neumann condition appears in the formulation after integration by parts: \[\begin{aligned} \int_0^1 \hat{u}'(x) v'(x)\, dx - \left[ \hat{u}'(x) v(x) \right]_0^1 &= \int_0^1 \hat{u}'(x) v'(x)\, dx - \hat{u}'(1)v(1) + \hat{u}'(0)v(0) \\ &= \int_0^1 \hat{u}'(x) v'(x)\, dx - gv(1) \end{aligned}\] since \(v(0)=0\) and \(u'_h(1)=g\). This leads to the final formulation: Find \(u_h\in V_h\) such that \[\begin{aligned} \int_0^1 u'_h(x) v'(x)\,dx = \int_0^1 f(x) v(x)\,dx + gv(1),\qquad \forall v\in V_h \label{modelgal2} \end{aligned}\]
- Example
-
: With our previous triangulation, we now get another basis function \(\varphi_4\). For simplicity, set \(f=g=1\). All the matrix entries and right-hand side values are then identical, and we only calculate the new values: \[\begin{aligned} a_{44} &= (4)^2 \frac14 = 4 \\ a_{34} &= a_{43} = (-4)\cdot 4 \cdot \frac14 = -4 \\ f_4 &= \frac18 + g\cdot 1 = \frac98 \end{aligned}\] The linear system then becomes \[\begin{aligned} \begin{bmatrix} 8 & -4 & 0 & 0\\ -4 & 8 & -4 & 0\\ 0 & -4 & 8 & -4 \\ 0 & 0 & -4 & 4 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \\ u_4 \end{bmatrix} = \begin{bmatrix} 1/4 \\ 1/4 \\ 1/4 \\ 9/8 \end{bmatrix} \end{aligned}\] with solution \[\begin{aligned} u = (u_1, u_2, u_3, u_4)^T = (15/32, 7/8, 39/32, 3/2)^T. \end{aligned}\]
Inhomogeneous Dirichlet problems
Use two spaces: \(V_h\), which enforces the inhomogeneous Dirichlet condition, for the solution \(u_h\), and \(V^0_h\), which enforces homogeneous Dirichlet conditions, for the test function \(v\). Consider for example the model problem \[\begin{aligned} -u''(x) &= f,\text{ for } x\in (0,1) \label{model2eq1} \\ u(0) &= 0 \label{model2eq2} \\ u(1) &= 1 \label{model2eq3} \end{aligned}\] with exact solution \(u(x) = x(3-x)/2\). Use the spaces \[\begin{aligned} V_h = \{ v\in C^0([0,1]) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h,\ v(0)=0, v(1)=1 \}, \\ V^0_h = \{ v\in C^0([0,1]) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h,\ v(0)=0, v(1)=0 \}. \end{aligned}\] The FEM formulation becomes: Find \(u_h\in V_h\) such that \[\begin{aligned} \int_0^1 u_h' v'\,dx = \int_0^1 fv\, dx,\qquad \forall v\in V^0_h. \end{aligned}\] Note that the function space \(V_h\) is not a linear vector space, due to the inhomogeneous constraint. In practice, Dirichlet conditions are implemented by first considering the all-Neumann problem, and enforcing the Dirichlet conditions directly into the resulting system of equations.
- Example
-
: For the model problem ([model2eq1])-([model2eq3]), first consider the corresponding all-Neumann problem \[\begin{aligned} -u''(x) &= f,\text{ for } x\in (0,1) \label{model2neueq1} \\ u'(0) &= u'(1) = 0 \label{model2neueq2} \end{aligned}\] with the solution space \[\begin{aligned} V_h = \{ v\in C^0([0,1]) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h \}. \end{aligned}\] In our example with four elements of size \(h=1/4\), this gives \(5\) degrees of freedom and the resulting linear system (with \(f=1\)): \[\begin{aligned} \begin{bmatrix} 4 & -4 & 0 & 0 & 0 \\ -4 & 8 & -4 & 0 & 0\\ 0 & -4 & 8 & -4 & 0\\ 0 & 0 & -4 & 8 & -4 \\ 0 & 0 & 0 & -4 & 4 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \\ u_4 \\ u_5 \end{bmatrix} = \begin{bmatrix} 1/8 \\ 1/4 \\ 1/4 \\ 1/4 \\ 1/8 \end{bmatrix} \end{aligned}\] This system is singular (since the solution is undetermined up to a constant). We can now impose the Dirichlet conditions \(u(0)=0\) and \(u(1)=1\) directly by replacing the corresponding equations: \[\begin{aligned} \begin{bmatrix} 1 & 0 & 0 & 0 & 0 \\ -4 & 8 & -4 & 0 & 0\\ 0 & -4 & 8 & -4 & 0\\ 0 & 0 & -4 & 8 & -4 \\ 0 & 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \\ u_4 \\ u_5 \end{bmatrix} = \begin{bmatrix} 0 \\ 1/4 \\ 1/4 \\ 1/4 \\ 1 \end{bmatrix} \end{aligned}\] We can keep the symmetry of the matrix by eliminating the entries below/above the diagonal of the Dirichlet variables: \[\begin{aligned} \begin{bmatrix} 1 & 0 & 0 & 0 & 0 \\ 0 & 8 & -4 & 0 & 0\\ 0 & -4 & 8 & -4 & 0\\ 0 & 0 & -4 & 8 & 0 \\ 0 & 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ u_3 \\ u_4 \\ u_5 \end{bmatrix} = \begin{bmatrix} 0 \\ 1/4 - (-4)\cdot 0 \\ 1/4 \\ 1/4 - (-4)\cdot 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 0 \\ 1/4 \\ 1/4 \\ 17/4 \\ 1 \end{bmatrix} \end{aligned}\] with solution \(u=(u_1,\ldots,u_5)^T = (0, 11/32, 5/8, 27/32, 1)^T\). If necessary, the Dirichlet degress of freedom can be removed from the system, to obtain the smaller system of equations \[\begin{aligned} \begin{bmatrix} 8 & -4 & 0\\ -4 & 8 & -4\\ 0 & -4 & 8 \\ \end{bmatrix} \begin{bmatrix} u_2 \\ u_3 \\ u_4 \end{bmatrix} = \begin{bmatrix} 1/4 \\ 1/4 \\ 17/4 \end{bmatrix} \end{aligned}\]
The stamping method (“Assembly”)
Consider a single element \(e_k\), and its local basis functions \(\mathcal{H}^k_i(x)\), \(j=1,2\), given by the restriction of the global basis functions \(\varphi_j(x)\) to the element. The connection between the local indices \(i\) and the global indices \(j\) are given by a mesh representation. For simplex elements, we use the form
\(p\): \(N\times D\) node coordinates
\(t\): \(T\times (D+1)\) element indices
Here, row \(k\) of \(t\) is the local-to-global mapping for element \(k\). The local basis functions are:
Defined only inside the element \(e_k\)
Polynomials of degree 1
We can then define an elemental matrix \(A^k\), or a local stiffness matrix, by again considering only the contribution to the global stiffmatrix from element \(e_k\): \[\begin{aligned} A^k_{ij} = \int_{e_k} (\mathcal{H}^k_i)' \cdot (\mathcal{H}^k_j)'\, dx,\qquad i=1,2,\ j=1,2 \end{aligned}\] and, similarily, an elemental load vector \(\boldsymbol{b}^k\) by \[\begin{aligned} b^k_i = \int_{e_k} f(x)\cdot(\mathcal{H}^k_i)\,dx,\qquad i=1,2 \end{aligned}\]
In the so-called stamping method, or the assembly process, each element matrix and load vector are added at the corresponding global position in the global stiffness matrix and right-hand side vector:
| \(A=0\), \(\boldsymbol{b}=0\) | |
| for all elements \(k\) | |
| Calculate \(A^k\), \(\boldsymbol{b}^k\) | |
| \(A(t(k,:), t(k,:))\ +\hspace{-1.5mm}=\ A^k\) | |
| \(\boldsymbol{b}(t(k,:))\ +\hspace{-1.5mm}=\ \boldsymbol{b}^k\) | |
| end for |
- Example
-
: Equidistant 1D mesh, element width \(h\), piece-wise linears, \(f=1\). The elemental matrix and load vector are \[\begin{aligned} A^k = \frac{1}{h} \begin{bmatrix} 1 & -1 \\ -1 & 1 \end{bmatrix}, \qquad \boldsymbol{b}^k = \frac{h}{2} \begin{bmatrix} 1 \\ 1 \end{bmatrix} \end{aligned}\] The mesh is represented by the arrays \[\begin{aligned} p = \begin{bmatrix} x_0 \\ x_1 \\ \vdots \\ x_n \end{bmatrix}, \qquad t = \begin{bmatrix} 1 & 2 \\ 2 & 3 \\ \vdots \\ n & n+1 \end{bmatrix} \end{aligned}\] The stamping method gives the global matrices: \[\begin{aligned} \frac{1}{h} \begin{bmatrix} 1 & -1 & & & & & \\ -1 & 1 & & & & & \\ \\ \\ \\ \\ \end{bmatrix} &\rightarrow \frac{1}{h} \begin{bmatrix} 1 & -1 & & & & & \\ -1 & 2 & -1& & & & \\ & -1 & 1 \\ \\ \\ \\ \end{bmatrix} \rightarrow \frac{1}{h} \begin{bmatrix} 1 & -1 & & & & & \\ -1 & 2 & -1& & & & \\ & -1 & 2 & -1 \\ & & -1 & 1 \\ \\ \\ \\ \end{bmatrix} \nonumber \\ &\rightarrow \frac{1}{h} \begin{bmatrix} 1 & -1 & & & & & \\ -1 & 2 & -1& & & & \\ & -1 & 2 & -1 \\ & & -1 & 2 & -1 \\ & & & -1 & 2 & -1 \\ & & & & -1 & 2 & -1 \\ & & & & & -1 & 1 \\ \end{bmatrix} = A \end{aligned}\] and, similarily, the right-hand side vector \[\begin{aligned} \boldsymbol{b} = \frac{h}{2} \begin{bmatrix} 1 & 2 & \cdots & 2 & 1 \end{bmatrix}^T \end{aligned}\]
Higher order
Introduce the space of continuous piece-wise quadratics: \[\begin{aligned} V_h = \{ v\in C^0(\Omega) : v|_K \in \mathbb{P}_2(K)\ \forall K\in T_h \}. \end{aligned}\] Parameterize by adding degrees of freedom at element midpoints. Each element then has three local nodes: \(x^k_1, x^k_2, x^k_3\), and three local basis functions \(\mathcal{H}^k_1(x), \mathcal{H}^k_2(x), \mathcal{H}^k_3(x)\). These are determined by solving for the polynomial coefficients in \[\begin{aligned} \mathcal{H}_i^k = a_i + b_ix + c_i x^2,\qquad i=1,2,3 \end{aligned}\] and requiring that \(\mathcal{H}_i^k(x_j) = \delta_{ij}\), for each \(i,j = 1,2,3\). The leads to the linear system of equations \(VC=I\): \[\begin{aligned} \begin{bmatrix} 1 & x_1 & x_1^2 \\ 1 & x_2 & x_2^2 \\ 1 & x_3 & x_3^2 \end{bmatrix} \begin{bmatrix} a_1 & a_2 & a_3 \\ b_1 & b_2 & b_3 \\ c_1 & c_2 & c_3 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \end{aligned}\] which gives the coefficients \(C = V^{-1}\). For example, with \(x_1=0\), \(x_2=h/2\), \(x_3=h\), we get \[\begin{aligned} \mathcal{H}_1(x) &= \frac{2}{h^2} (x-\frac{h}{2})(x-h) \\ \mathcal{H}_2(x) &= -\frac{4}{h^2} x (x-h) \\ \mathcal{H}_3(x) &= \frac{2}{h^2} x (x-\frac{h}{2}) \end{aligned}\] The corresponding element matrix and the element load can then be calculated as before: \[\begin{aligned} A_{ij}^k = \int_0^h \mathcal{H}_i^k(x)'\mathcal{H}_j^k(x)'\,dx,\qquad b_i^k = \int_0^h f(x) \mathcal{H}_i^k(x)\, dx \end{aligned}\] for \(i,j=1,2,3\), which gives \[\begin{aligned} A^k = \frac{1}{3h} \begin{bmatrix} 7 & -8 & 1 \\ -8 & 16 & -8 \\ 1 & -8 & 7 \end{bmatrix} ,\qquad \boldsymbol{b}^k = \frac{h}{6} \begin{bmatrix} 1 \\ 4 \\ 1 \end{bmatrix} \end{aligned}\] For a global element with two elements of width \(h\), the stamping method gives the stiff matrix and right-hand side vector \[\begin{aligned} A = \frac{1}{3h} \begin{bmatrix} 7 & -8 & 1 \\ -8 & 16 & -8 \\ 1 & -8 & 7+7 & -8 & 1 \\ & & -8 & 16 & -8 \\ & & 1 & -8 & 7 \end{bmatrix},\qquad \boldsymbol{b} = \frac{h}{6} \begin{bmatrix} 1 \\ 4 \\ 1+1 \\ 4 \\ 1 \end{bmatrix} \end{aligned}\]
Numerical Quadrature
For more general cases, the integrals cannot be computed analytically. We then use Gaussian quadrature rules of the following form (not necessarily the same \(f\) as above): \[\begin{aligned} \int_{-1}^1 f(x)\,dx \approx \sum_{i=1}^n w_i f(x_i) \label{gaussquad} \end{aligned}\] when \(x_i,w_i\), \(i=1,\ldots,n\) are specified points and weights. By choosing \(x_i\) as the zeros of the \(n\)th Legendre polynomial, and the weights such that the rule exactly integrates polynomials up to degree \(n-1\), the rule ([gaussquad]) gives exact integration for polynomials of degree \(\le 2n-1\).
For example, the following rule has \(n=2\) and degree of precision \(2\cdot 2 - 1 = 3\): \[\begin{aligned} \int_{-1}^1 f(x)\,dx \approx f(-\frac{1}{\sqrt{3}}) + f(\frac{1}{\sqrt{3}}) \end{aligned}\] In our quadratic element example, the integrals for the element matrix were products of derivatives of quadratics, that is, quadratics. Therefore they can be exactly evaluated using this rule: \[\begin{aligned} A_{11}^k &= \left[ \text{Set } f(x) = \left[ \frac{2}{h^2} \left(2x - \frac{3h}{2}\right) \right]^2 \right] = \int_0^h f(x)\, dx \\ &= \frac{h}{2} \left[ f(\frac{h}{2} - \frac{h}{2\sqrt{3}}) + f(\frac{h}{2} + \frac{h}{2\sqrt{3}}) \right] = \cdots = \frac{7}{3h} \end{aligned}\]
The Poisson Problem in 2-D
Consider the problem \[\begin{aligned} -\nabla^2 u &= f \text{ in }\Omega \\ n\cdot\nabla u &= g \text{ on } \Gamma \end{aligned}\] for a domain \(\Omega\) with boundary \(\Gamma\)
Introduce the space of piecewise linear continuous functions on a mesh \(T_h\): \[\begin{aligned} V_h = \{ v\in C^0(\Omega) : v|_K \in \mathbb{P}_1(K)\ \forall K\in T_h \}. \end{aligned}\]
Seek solution \(u_h\in V_h\), multiply by a test function \(v\in V_h\), and integrate: \[\begin{aligned} \int_\Omega -\nabla^2 u_h v\,dx = \int_\Omega fv\,dx \end{aligned}\]
Apply the divergence theorem and use the Neumann condition, to get the Galerkin form \[\begin{aligned} \int_\Omega \nabla u_h\cdot \nabla v\,dx = \int_\Omega fv\,dx + \oint_\Gamma g v\,ds \end{aligned}\]
Finite Element Formulation
Expand in basis \(u_h=\sum_i u_{h,i} \varphi_i(x)\), insert into the Galerkin form, and set \(v = \varphi_i\), \(i=1,\ldots,n\): \[\begin{aligned} \int_\Omega \left[\sum_{j=1}^n u_{h,j}\nabla\varphi_j\right]\cdot\nabla \varphi_i\,dx = \int_\Omega f\varphi_i\,dx + \oint_\Gamma g\varphi_i\,ds \end{aligned}\] Switch order of integration and summation to get the finite element formulation: \[\begin{aligned} \sum_{j=1}^n A_{ij} u_{h,j} = b_i,\quad\text{or}\quad A\boldsymbol{u} = \boldsymbol{b} \end{aligned}\] where \[\begin{aligned} A_{ij} = \int_\Omega \nabla\varphi_i\cdot\nabla\varphi_j\,dx, \quad b_i = \int_\Omega f \varphi_i\,dx + \oint_\Gamma g\varphi_i\,ds \end{aligned}\]
Discretization
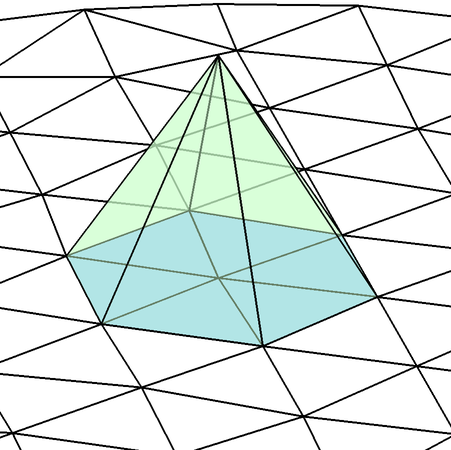
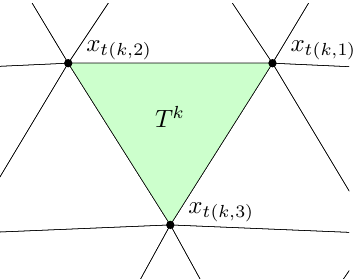
Find a tringulation of the domain \(\Omega\) into triangular elements \(T^k\), \(k=1,\ldots,K\) and nodes \(\boldsymbol{x}_i\), \(i=1,\ldots,n\)
Consider the space \(V_h\) of continuous functions that are linear within each element
Use a nodal basis \(V_h=\mathrm{span}\{\varphi_1,\ldots,\varphi_n\}\) defined by \[\begin{aligned} \varphi_i\in V_h,\quad \varphi_i(\boldsymbol{x}_j)=\delta_{ij},\quad 1\le i,j\le n \end{aligned}\]
A function \(v\in V_h\) can then be written \[\begin{aligned} v=\sum_{i=1}^n v_i\varphi_i(\boldsymbol{x}) \end{aligned}\] with the nodal interpretation \[\begin{aligned} v(\boldsymbol{x}_j)=\sum_{i=1}^n v_i\varphi_i(\boldsymbol{x}_j) = \sum_{i=1}^n v_i\delta_{ij} = v_j \end{aligned}\]
Local Basis Functions
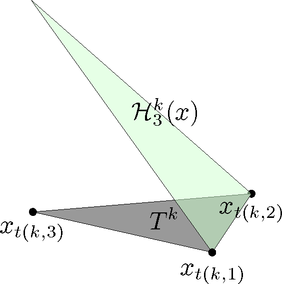
Consider a triangular element \(T^k\) with local nodes \(\boldsymbol{x}_1^k, \boldsymbol{x}_2^k, \boldsymbol{x}_3^k\)
The local basis functions \(\mathcal{H}_1^k,\mathcal{H}_2^k,\mathcal{H}_3^k\) are linear functions: \[\begin{aligned} \mathcal{H}_\alpha^k = c_\alpha^k + c_{x,\alpha}^k x + c_{y,\alpha}^k y,\quad \alpha=1,2,3 \end{aligned}\] with the property that \(\mathcal{H}_\alpha^k(x_\beta) = \delta_{\alpha\beta}\), \(\beta=1,2,3\)
This leads to linear systems of equations for the coefficients: \[\begin{aligned} \begin{pmatrix} 1 & x_1^k & y_1^k \\ 1 & x_2^k & y_2^k \\ 1 & x_3^k & y_3^k \end{pmatrix} \begin{pmatrix} c_\alpha^k \\ c_{x,\alpha}^k \\ x_{y,\alpha}^k \end{pmatrix} = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \text{ or } \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} \text{ or } \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \end{aligned}\] or \(C = V^{-1}\) with coefficient matrix \(C\) and Vandermonde matrix \(V\)
Elementary Matrices and Loads
The elementary matrix for an element \(T^k\) becomes \[\begin{aligned} A^k_{\alpha\beta} &= \int_{T^k} \frac{\partial \mathcal{H}_\alpha^k}{\partial x} \frac{\partial \mathcal{H}_\beta^k}{\partial x} + \frac{\partial \mathcal{H}_\alpha^k}{\partial y} \frac{\partial \mathcal{H}_\beta^k}{\partial y}\,dx \\ &= \mathrm{Area}^k (c_{x,\alpha}^k c_{x,\beta}^k + c_{y,\alpha}^k c_{y,\beta}^k),\quad \alpha,\beta=1,2,3 \end{aligned}\]
The elementary load becomes \[\begin{aligned} b^k_\alpha &= \int_{T^k} f\,\mathcal{H}_\alpha^k\,dx \\ &= \text{(if $f$ constant)} \\ &= \frac{\mathrm{Area}^k}{3}f,\quad \alpha=1,2,3 \end{aligned}\]
Assembly, The Stamping Method
Assume a local-to-global mapping \(t(k,\alpha)\), giving the global node number for local node number \(\alpha\) in element \(k\)
The global linear system is then obtained from the elementary matrices and loads by the stamping method:
\(A=0\), \(b=0\) for \(k=1,\ldots,K\) \(A(t(k,:),t(k,:)) = A(t(k,:),t(k,:)) + A^k\) \(b(t(k,:)) = b(t(k,:)) + b^k\)
Dirichlet Conditions
Suppose Dirichlet conditions \(u=u_D\) are imposed on part of the boundary \(\Gamma_D\)
Enforce \(u_{h,i} = u_D\) for all nodes \(i\) on \(\Gamma_D\) directly in the linear system of equations: \[\begin{aligned} & \qquad\qquad\qquad\,i \nonumber \\ \begin{array}{c} \\ \\ i \\ \\ \\ \end{array} &\begin{pmatrix} \\ \\ 0 & \cdots & 0 & 1 & 0 & \cdots & 0 \\ \\ \\ \end{pmatrix} u_h = \begin{pmatrix} \\ \\ u_D \\ \\ \\ \end{pmatrix} \end{aligned}\]
Eliminate below/above diagonal of the Dirichlet nodes to retain symmetry