14.1. Initial Value Problems#
Many phenomena in science, engineering, and economics are described not by their value, but by their rate of change. This leads us to differential equations. A very common form is the initial value problem (IVP), which we can write as:
Here, \(f(t,y)\) is a right-hand side function that defines the dynamics (the change), and \(y(t_0) = y_0\) is the initial condition that specifies the state of the system at a starting time \(t_0\). The independent variable \(t\) often represents time.
In your calculus classes, you learned to find exact (or closed-form) solutions for some specific types of equations, like certain linear and separable equations. However, for many (if not most) real-world problems, finding an exact formula for \(y(t)\) is impossible.
This is where numerical methods come in! We’ll learn how to use a computer to find a highly accurate approximation to the solution \(y(t)\) at a series of discrete time points.
using Plots, LinearAlgebra
14.1.1. Euler’s Method: The Simplest Approach#
The most basic and intuitive numerical method for IVPs is Euler’s method. It’s a great starting point for understanding all other methods.
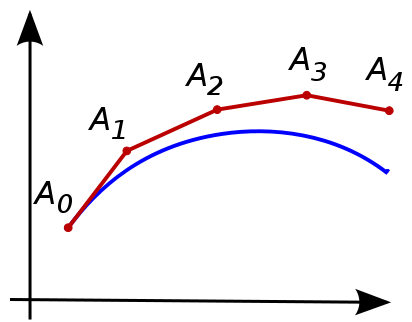 (from Wikipedia, https://en.wikipedia.org/wiki/Euler_method).
(from Wikipedia, https://en.wikipedia.org/wiki/Euler_method).
The core idea is simple: we start at our known point \((t_0, y_0)\) and take a small step forward in time, assuming the slope (the derivative) is constant during that step.
First, we choose a step size, \(h\). This defines a set of discrete time points \(t_n = t_0 + nh\) for \(n = 0,1,2,\ldots\). We want to find the approximate solution \(y_n\) at each time \(t_n\).
At time \(t_n\), we know the approximate value \(y_n\) and we can calculate the slope \(y'(t_n) = f(t_n, y_n)\). To find the next value \(y_{n+1}\), we just follow this tangent line from \(y_n\) for a duration of \(h\):
This formula is just the definition of the derivative, \(y'(t_n) \approx \frac{y_{n+1} - y_n}{h}\), rearranged to solve for \(y_{n+1}\).
With some assumptions on the IVP and a small enough step size \(h\), these values \(y_n\) can be shown to be a good approximation to the true solution, \(y_n \approx y(t_n)\).
While we’ve described this for a single (scalar) function \(y(t)\), the method works exactly the same way for systems of equations, where \(y(t)\) and \(f(t,y(t))\) are vectors. This is why our implementation will be general.
14.1.2. Implementing Euler’s Method#
Let’s write a general Julia function for Euler’s method. It will take the right-hand side function f as an argument, along with the initial condition y0, the step size h, and the total number of steps N. We’ll also add an optional argument t0 which defaults to 0.0.
Note that our implementation is designed to support vector-valued solutions from the start. We’ll make y0 a vector (or treat a scalar as a 1-element vector), and our output y will be a 2D array where each column represents the state \(y_n\) at a given time step. This is a common and efficient convention in Julia.
function euler(f, y0, h, N, t0=0.0)
# 1. Create the array of time points
# t_n = t0 + n*h for n = 0, 1, ..., N
t = t0 .+ h*(0:N)
# 2. Initialize the solution array
# We need N+1 columns to store y0, y1, ..., yN
# length(y0) gives the size of the state vector (1 for scalar problems)
y = zeros(length(y0), N+1)
# 3. Set the initial condition
# y[:,1] is the first column
y[:,1] .= y0
# 4. Loop N times to take N steps
for n = 1:N
# Apply the Euler update rule:
# y_new = y_old + h * f(t_old, y_old)
# We use y[:,n] to get the n-th column (the state at time t[n])
# and store the result in the (n+1)-th column (the state at time t[n+1])
y[:,n+1] = y[:,n] + h * f(t[n], y[:,n])
end
# 5. Return the time points and the solution history
return t,y
end
euler (generic function with 2 methods)
14.1.2.1. Example 1: A Simple Test Case#
We’ll demonstrate the method on a model problem: \(f(t,y) = -y + \sin t\) with \(y(0) = 1\). Let’s first solve it using \(h=0.2\) for \(N=20\) steps, which will take us to a final time of \(T = N \times h = 4.0\).
# Define the right-hand side function f(t,y)
# We use broadcasting (.-y .+ sin(t)) so it works for vector 'y'
f(t,y) = -y .+ sin(t)
# Run Euler's method:
# y0 = 1 (our scalar initial condition)
# h = 0.2
# N = 20 steps
t,y = euler(f, 1, 0.2, 20)
# Plot the result
# y is a 1x(N+1) array, so we plot the first row y[1,:]
plot(t, y[1,:], markershape=:circle, label="Euler (h=0.2)",
title="Euler's Method Example", xlabel="t", ylabel="y(t)")
14.1.2.2. Convergence of Euler’s Method#
A single run is nice, but the real test of a method is its convergence: does the approximate solution get closer to the true solution as we make the step size \(h\) smaller?
Let’s compare our numerical results to the exact analytical solution for this problem, which is:
We’ll write a helper function run_testproblem to solve the IVP from \(t=0\) to \(t=2.0\) using several different step sizes \(h\) and plot them all against the exact solution. We’ll also print the maximum error for each \(h\).
Pay close attention to the error. We expect that as \(h\) is cut in half (e.g., from 0.2 to 0.1), the error also gets cut in half. This is what we mean when we say the method is first-order accurate (the error scales linearly with \(h\), or \(O(h^1)\)).
function run_testproblem(IVP_method)
# 1. Define the exact solution as a Julia function
yexact(t) = exp(-t) + (sin(t) - cos(t) + exp(-t)) / 2
# 2. Create a fine time grid for plotting the exact solution
tt = 0:0.01:2
# 3. Plot the exact solution for reference
plot(tt, yexact.(tt), label="Exact", lw=2,
title="Method Convergence Test", xlabel="t", ylabel="y(t)")
# 4. Loop over a few different step sizes
for h = [0.5, 0.2, 0.1]
# Calculate number of steps N to reach t=2.0
N = round(Int, 2/h)
# Run the provided solver (e.g., euler or rk4)
t,y = IVP_method(f, 1, h, N)
# Plot the numerical solution
# Note: y[1,:] is used because our solvers return a 2D array
plot!(t, y[1,:], markershape=:circle, label="h=$h")
# 5. Calculate and print the maximum error
# We compare the numerical solution y[1,:]
# with the exact solution evaluated at the same time points, yexact.(t)
max_err = maximum(abs.(y[1,:] - yexact.(t)))
println("Method: $(string(IVP_method)), h=$h. Max error: $max_err")
end
# Display the final plot
plot!()
end
run_testproblem (generic function with 1 method)
# Now, let's run the test harness with our 'euler' function.
# Observe the plot and the printed error values.
run_testproblem(euler)
Method: euler, h=0.5. Max error: 0.21269073192494037
Method: euler, h=0.2. Max error: 0.07405303316185208
Method: euler, h=0.1. Max error: 0.034963406690659005
14.1.3. A Better Method: 4th-Order Runge-Kutta (RK4)#
While Euler’s method is simple to understand, its first-order convergence is often too slow for practical use. To get high accuracy, you’d need an extremely small \(h\), which means many steps and a long computation time.
We can do much better. The idea is to evaluate the slope \(f(t,y)\) at several points within the step (not just at the beginning) and combine them in a clever way to get a more accurate estimate. This is the central idea of the Runge-Kutta family of methods.
One of the most popular and widely used methods is the 4th-order Runge-Kutta method (RK4). It’s a workhorse of numerical computation. For each step, it calculates four intermediate slopes (called stages), \(k_1, k_2, k_3, k_4\):
Here’s the intuition:
\(k_1\) is the familiar slope at the beginning of the step (just like Euler’s method).
\(k_2\) is an estimate of the slope at the midpoint of the step, using \(k_1\) to estimate the \(y\)-value at the midpoint.
\(k_3\) is another estimate of the slope at the midpoint, but using the more accurate \(k_2\) to estimate the \(y\)-value.
\(k_4\) is an estimate of the slope at the end of the step, using \(k_3\) to estimate the \(y\)-value.
The final update is a weighted average of these four slopes. Notice the slopes from the midpoint (\(k_2, k_3\)) are given more weight. This specific combination is what gives the method its 4th-order accuracy. This means if we halve the step size \(h\), the error should decrease by a factor of \(2^4 = 16\)! This is a massive improvement over Euler’s method.
function rk4(f, y0, h, N, t0=0)
# 1. Setup time and solution arrays, just like in euler()
t = t0 .+ h*(0:N)
y = zeros(length(y0), N+1)
# 2. Set initial condition
y[:,1] .= y0
# 3. Loop N times to take N steps
for n = 1:N
# Calculate the four stages (k1, k2, k3, k4)
# k1: slope at the beginning
k1 = h * f(t[n], y[:,n])
# k2: first midpoint slope estimate
k2 = h * f(t[n] + h/2, y[:,n] + k1/2)
# k3: second midpoint slope estimate
k3 = h * f(t[n] + h/2, y[:,n] + k2/2)
# k4: slope at the end
k4 = h * f(t[n] + h, y[:,n] + k3)
# 4. Combine the stages for the final update (weighted average)
y[:,n+1] = y[:,n] + (k1 + 2*k2 + 2*k3 + k4) / 6
end
return t,y
end
rk4 (generic function with 2 methods)
Now for the exciting part. Let’s run our run_testproblem harness again, but this time, we’ll pass it our new rk4 function. Compare the results directly to the Euler run.
# Run the test harness with the 'rk4' function.
# Look at the plot and the printed error values.
run_testproblem(rk4)
Method: rk4, h=0.5. Max error: 0.00045648169894996204
Method: rk4, h=0.2. Max error: 8.887217012087945e-6
Method: rk4, h=0.1. Max error: 5.015261516083669e-7
14.1.3.1. RK4 Analysis#
The difference is remarkable!
On the plot: All three RK4 solutions (even the one with a large step \(h=0.5\)) are visually indistinguishable from the exact solution.
The errors: For \(h=0.5\), the error is already on the order of \(10^{-4}\), which is significantly better than Euler’s method with \(h=0.1\) (which had an error of \(\sim 10^{-2}\)).
Convergence Order: Let’s check the 4th-order claim.
The error for \(h=0.2\) is \(\sim 9 \times 10^{-6}\).
The error for \(h=0.1\) (halving the step) is \(\sim 5 \times 10^{-7}\).
The ratio of the errors is \((9 \times 10^{-6}) / (5 \times 10^{-7}) \approx 18\). This is close to the \(16\) we predicted (\(2^4 = 16\))! This confirms the 4th-order accuracy of the RK4 method.
This is the power of higher-order methods: they provide exceptional accuracy with a much larger step size, making them far more efficient for most problems.