14.2. Higher-Order Derivatives, Systems of ODEs#
Our implementation of RK4 supports systems of ODEs, that is, problems with vector-valued solutions \(y(t)\). This can also be used to solve scalar-valued equations with higher-order derivatives. Consider e.g. the motion of a pendulum, with an angle \(\theta\) from the vertical axis and normalized physical constants:
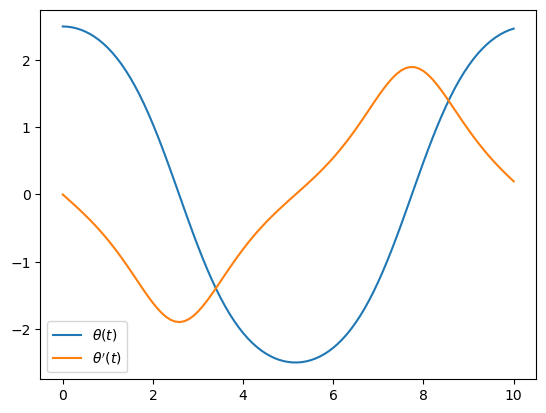
To write this as a system of first-order equations, we introduce the first derivative \(\theta'(t)\) as a new unknown and solve for the vector-valued function \(y(t) = (\theta(t), \theta'(t))\). The corresponding right-hand side in the system of equations then becomes
This is implemented below, and solved for an initial condition \(y(0) = (\theta(0), \theta'(0)) = (2.5,0)\) using a step size of \(h=0.1\) up to time \(T=10\):
using PyPlot, PyCall
function rk4(f, y0, h, N, t0=0)
t = t0 .+ h*(0:N)
y = zeros(N+1, length(y0))
y[1,:] .= y0
for n = 1:N
k1 = h * f(t[n], y[n,:])
k2 = h * f(t[n] + h/2, y[n,:] + k1/2)
k3 = h * f(t[n] + h/2, y[n,:] + k2/2)
k4 = h * f(t[n] + h, y[n,:] + k3)
y[n+1,:] = y[n,:] + (k1 + 2k2 + 2k3 + k4) / 6
end
return t,y
end
rk4 (generic function with 2 methods)
f(t,y) = [y[2], -sin(y[1])]
y0 = [2.5, 0]
h = 0.1
T = 10
t,y = rk4(f, y0, h, round(Int, T/h))
plot(t,y)
legend(("\$\\theta(t)\$", "\$\\theta'(t)\$"));
The motion of the pendulum can also be animated:
animation = pyimport("matplotlib.animation");
fig, ax = subplots(figsize=(5,5))
function update(frame)
θ = y[frame+1,1]
ax.clear()
ax.plot([0,sin(θ)], [0,-cos(θ)], linewidth=2)
ax.add_artist(matplotlib.patches.Circle([sin(θ),-cos(θ)], 0.1))
ax.set_xlim([-1.5,1.5])
ax.set_ylim([-1.5,1.5])
end
ani = animation.FuncAnimation(fig, update, frames=length(t), interval=50)
close(ani._fig)
@pyimport IPython.display as d
d.HTML(ani.to_jshtml())